
Table of Contents
Robotics navigation engineering is the future and present of the world. Robotics plays a very crucial role in transforming many of the existing industries.
The intelligent system derives its pathways from robot navigation engineering. Robot navigation engineering is applicable for industries such as drones, autonomous vehicles, service robots, automations in the warehouse and so on.
Introduction
The robot navigation engineering focuses on the key abilities of the robot to make the environment more efficient and accessible, understand the surroundings, personalise, localise, plan and execute the tasks smoothly. Robotics navigation has slowly become the need of the hour. The robot navigation focuses on a better understanding of the key functionalities of robotics.

If you’re also preparing to crack your robot navigation engineering interview, you have to prepare with the most frequently asked interview questions. Both beginners and experts can rely on these questions, along with the structured, strategically phrased answers.
– Robot navigation engineering is the combination of AI, algorithms, and robotics
– Core elements of robot navigation engineering include localisation, mapping, planning, and control.
– Strong knowledge of SLAM and A* is crucial
– Robot navigation engineering makes use of sensors like IMU, LiDAR, GPS and cameras.
– Extensive Knowledge in Kalman Filters and particle filters is essential
– Practical experience with tools such as ROS, C++, and Python
Basic Robot Navigation Engineer Interview Questions and Answers
Robot navigation engineers design and develop the system for robots to understand and familiarise themselves with the surroundings, positions and routes and locate themselves both in known and unknown environments.
Robot navigation engineering is a multidisciplinary field, as it includes robots, mechanical and electrical engineering, computer science and artificial engineering. It smoothly incorporates software algorithms, mathematics, systems, and robotics tools to facilitate the autonomous movements in robots.
Understanding the robot navigation in its fullest form is the only way with which you can crack your interviews. Knowing the field and understanding the nuances can only aid you in proving yourself in front of the interview board. Here are the basic interview questions that boost your confidence!
Start learning robotics today! Build strong fundamentals with expert-led training.
-
What is the key role of a Robot Navigation Engineer?
A robot navigation engineer is responsible for designing the algorithm that aids the proper navigation of a robot. The algorithm is suitable for thoroughly understanding the environment in which it works.
- Localisation of their pathways
- Map creation for the safer routes
- Overcomes obstacles
The robot navigation works well with sensors such as LiDAR, IMU, GPS, and efficient cameras. The motion planning algorithms that allow the robot to systematically monitor and track include control systems, robot operating systems and SLAM systems. Together as a whole, robot navigation aids in the better equipment and functioning of robots.
-
Define Robot Navigation
Robot navigation is a better way of carefully enabling the robots to navigate and understand the surroundings, plan paths and navigate through maps, locate their position and paths, avoid unnecessary obstacles and clear their paths.
The robot navigation is the process of carefully enabling the localisation, planning, mapping, motion detection and control in an advanced mode.
-
What are the major components of robot navigation?
Robot navigation involves key components such as perception, localisation, planning, mapping and control.
-
Define the core components of robot navigation.
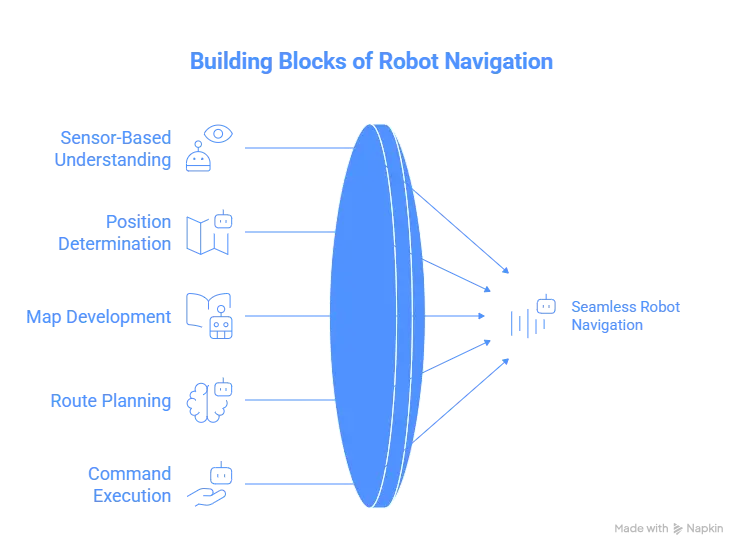
The core components of robot navigation involve
- Sensor-based understanding of the working environment
- Position determination of the robot
- Developing a structured map of surroundings
- Planning an optimal route for the smooth functioning
- Following and executing the commands on unhindered movement
What is SLAM?
Simultaneous Localisation and Mapping is a core technique that allows a robot to develop a map of an unknown location and find a place for itself in the map.
-
What are the popular SLAM implementations?
The most popular SLAM implementations include mapping, RTAMB map and Cartographer.
-
What sensors are commonly used in robot navigation?
The common sensors used in robot navigation include DAR, cameras, IMUs, GPS, ultrasonic sensors, and wheel encoders.
-
What is the purpose of LiDAR?
LiDAR helps in navigating distances using the laser beams ejected from robots.
-
What is the purpose of IMU?
The Inertia Measurement Unit is widely used to track the rotation, movement and acceleration of the robots.
-
How is the wheel rotation in robotics identified in robotic navigation engineering?
The wheel rotation can be measured and easily tracked using wheel encoders.
Master Robotics and AI!
Ready to build the future? Join our comprehensive robotics course to bridge the gap between complex code and physical motion. You’ll gain hands-on experience giving you the technical edge needed to lead in the age of automation.
Know MoreIntermediate-Level Robot Navigation Engineer Interview Questions and Answers
Here are some intermediate-level questions that can help you to crack the robot navigation engineering interview.
-
What is localisation in robot navigation engineering?
Localisation helps in locating the position of the robots in known and unknown environments.
-
What are the different types of localisation?
The different types of localisation include common algorithms, global localisation, absolute localisation, relative localisation, and Monte Carlo localisation.
-
What are the key differences between mapping and localisation?
| Mapping | Localisation |
| Develop a map | Determines the position of robots |
| Focused on the environment | Focuses on position |
| Particularly used in unknown areas | Particularly uses known areas |
-
Define path planning.
Calculating an optimal path by avoiding obstacles and moving without hindrance in robots is widely known as path planning.
-
What are the different types of path planning?
Path planning includes global and local path planning.
-
What are the popular algorithms used in path planning?
The popular algorithms used in path planning include Dijkstra and RRT.
-
What is A*, an algorithm?
The A* algorithm is used for path planning using graphs. The algorithm follows and combines the cost from the start node (g) and the heuristic cost to the goal (h).
Therefore,
f(n) = g(n) + h(n)
-
What is an occupancy grid map?
The environment is shown as grids, and each cell indicates the probability of being occupied. This is widely used in path planning and SLAM.
Advanced Robot Navigation Engineer Interview Questions and Answers
If you’re an expert, you have to depend on advanced interview questions to crack your interview.
-
What is a Kalman filter in robot navigation?
The Kalman filter is an algorithm that helps in navigating the state in linear systems with the help of Gaussian noise. It helps in predicting the next state of the environment, sensor measurement updates and estimation error reductions.
-
What are the different variants of the Kalman filter?
The different variants of the Kalman filter include
Extended Kalman Filter (EKF) and Unscented Kalman Filter (UKF)
-
What is a PA particle filter?
The possible robot states can be determined with the help of a particle filter. The nonlinear and non-Gaussian systems make use of a particle filter for accurate measurements.
-
What are the different steps involved in particle filtration?
The major steps involved in particle filtration initial. The major steps involve in particle filtration are initialisation, prediction, updation and resampling.
-
What is the key difference between EKF and particle filter?
EKF involves Gaussian noise, whereas the particle filter uses non-Gaussian noise. While the particle filter uses multiple particles for estimation, the EKF only uses a single estimate; the computational cost is heavier in the particle filter compared to EKF.
-
What ks senor fusion?
For achieving improved accuracy, sensor fusion helps in combining data from various sensors.
It increases the localisation power tremendously.
-
What is ROS?
Robot Operating System ( ROS) is a framework used to create applications for robots. The communication infrastructure, tools and libraries are provided for the proper working of the framework.
-
Define ROS Navigation Stack?
The ROD navigation stack helps the robot to identify, understand, map, localise and plan suitable paths to avoid unnecessary obstacles.
-
What is AMCL?
Adaptive Monte Carlo Localisation uses particle filters for localisation in known maps.
Practical Scenario-Based Questions
-
How well do you handle dynamic obstacles?
You can easily handle the dynamic obstacles with the use of local planners, including DWA. It updates the cost maps real quick in real time. It uses sensor fusion, and obstacle prediction models can be implemented.
-
How to improve navigation accuracy?
The accuracy in navigation can be easily achieved with the aid of better calibration sensors, maps with high resolutions, fusion of sensors, filtering noise and tuning proper parameters.
-
How to test navigation systems?
You can test navigation systems using the simulation tools. The simulation tools will help you to understand the real nature of the navigation. The real-world testing is another way. The stress testing with the aid of obstacles can also be considered the most effective method to test the proper working of the navigation systems.
Master Robotics and AI!
Ready to build the future? Join our comprehensive robotics course to bridge the gap between complex code and physical motion. You’ll gain hands-on experience giving you the technical edge needed to lead in the age of automation.
Know MoreCoding and Technical Questions
-
Define a basic path planning logic.
Here is the step-by-step definition of the path planning logic.
The path planning logic involves
- The derivation of the current position
- Understand the goal position.
- A* algorithm running
- Path generation
- Velocity command generation
Behavioural interview questions
-
How to handle system failures effectively?
You can handle system failures with caution.
- Sensor input checking
- Log reviewing
- Subsystem isolation
- Issue resolving reproduction
- Path application

-
How to tackle a challenging robotics project
The challenging robotics project can be tackled using the STAR method of robotics, which includes
- Situation
- Task
- Action
- Result
Your major focus should be on the optimisation of the algorithm, problem-solving and debugging.
Robotics navigation interview tests your knowledge on the basic mathematical concepts such as linear algebra, Bayesian filtering, probability, kinematics, coordinate transformations and so on.
You should have a proper knowledge of C++, Python, Linux, OpenCV, MATLAB, ROS, and so on. If you could prove your worth as a candidate who has a strong foundation in mathematical concepts and tools and techniques used for careful navigation, you can prove your worth.
HR Questions
-
What inspires you to work as a robot navigation engineer?
The robotic intelligence systems always amuse me. The system building to aid the robots to navigate and operate even in the worst environments thrills me.
It probes me to use my analytical skills and allows me to understand the complexities of the real world. Robotics navigation carefully combines the mathematical concepts and principles along with the real world, and it allows me to widen my knowledge arenas.
-
How well do you handle a challenging situation?
The interviewer expects you to describe your strategies with confidence.
-
Are you passionate about developing new algorithms for the system?
At this point, an interview is not expecting factual answers but honest answers.
-
Describe a situation where you became the leader of a team.
The interviewer expects a positive reply from your side. You have to show how well you can work as a team.
Tips to Crack a Robot Navigation Engineer Interview
Familiarise yourself with the basic mathematical concepts, algorithms and tools for robotics.
- Understand SLAM thoroughly.
- Practise daily the path planning algorithm.
- Learn ROS project handling.
- Widen knowledge about particle filters.
- Work in real-world complex environments to understand the working models.
- Work on autonomous robot projects.
Start learning robotics today! Build strong fundamentals with expert-led training.
Conclusion
The combination of AI, mathematics, algorithms and robotics is what you can call robot navigation engineering, which allows you to deepen your knowledge of robotics algorithms and understand the real-world robotics engineering.
If you’re preparing to crack your next robot navigation engineering interview, you should have a grip on the mathematical concepts, debugging, ROS and algorithms. Working on real-world projects will help you to understand the complexities of robot navigation engineering more proficiently.
Hands-on experiences in robot navigation engineering can enhance your real-world experiences along with the theoretical knowledge. Attend the interview with confidence and determination. Fly high in your dreams.
Master Robotics and AI!
Ready to build the future? Join our comprehensive robotics course to bridge the gap between complex code and physical motion. You’ll gain hands-on experience giving you the technical edge needed to lead in the age of automation.
Know MoreFrequently Asked Questions
Who is a robot navigation engineer?
Robot navigation engineers design and develop the system for robots to understand and familiarise themselves with the surroundings, positions and routes and locate themselves both in known and unknown environments.
Name the sensors with which the robot navigation engineers work?
The robot navigation works well with sensors such as LiDAR, IMU, GPS, and efficient cameras.
What are the key focal areas of robot navigation engineers?
The robot navigation engineering focuses on the key abilities of the robot to make the environment more efficient and accessible, understand the surroundings, personalise, localise, plan and execute the tasks smoothly.
What is Adaptive Monte Carlo Localisation ?
Adaptive Monte Carlo Localisation uses particle filters for localisation in known maps.
Is Robot navigation engineering is a multi disciplinary field?
Yes. It smoothly incorporates software algorithms, mathematics, systems, and robotics tools to facilitate the autonomous movements in robots.







{kind=link}